These soft robotic actuators bend, extend, or pump water when inflated with air.
This work was featured by NewScientist, Popular Science, Engadget, Newsweek, Business Insider, and others. Combined with an accompanying project, this won the 2017 award for Contributions in Soft Robotics Research.



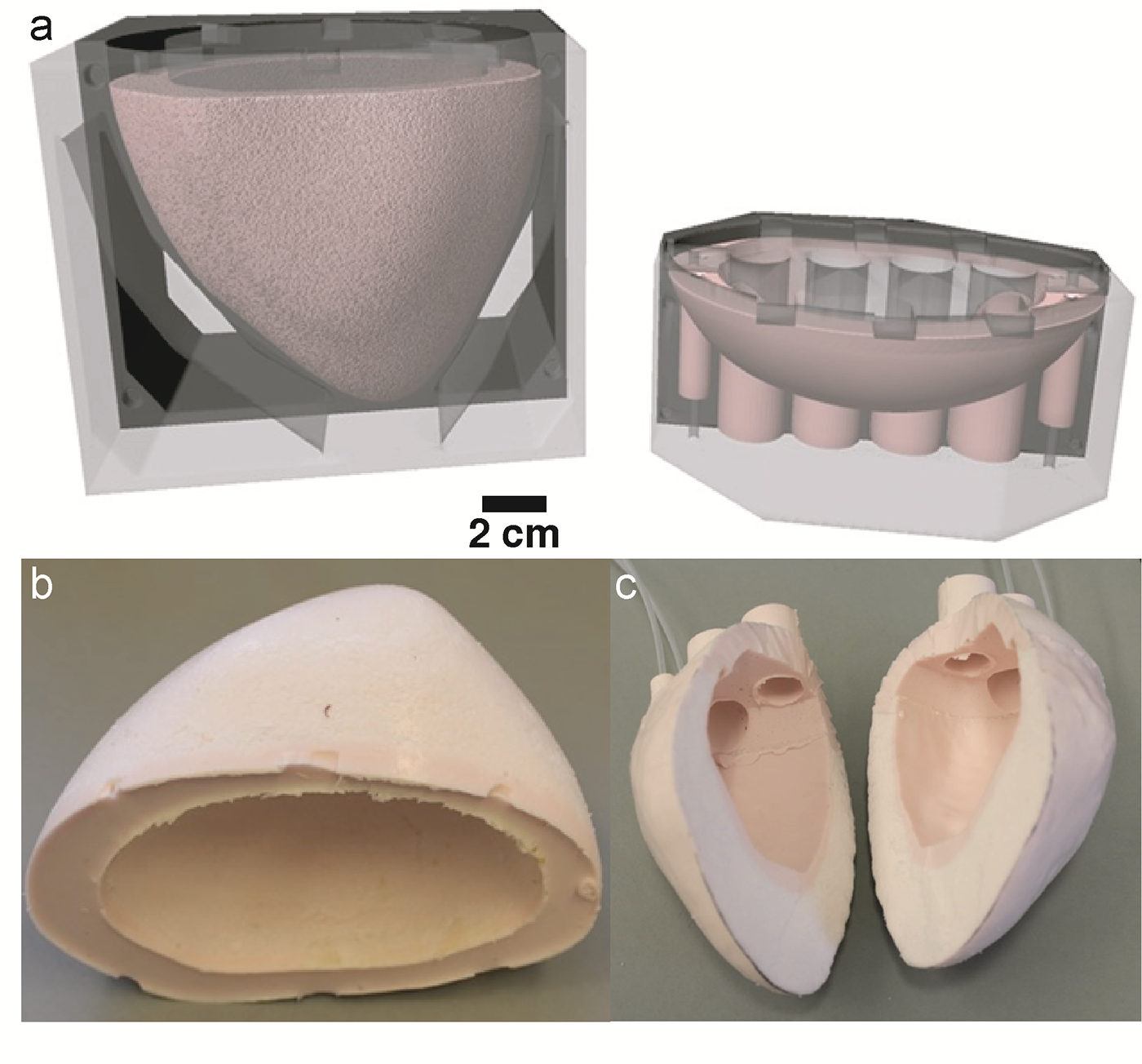
All of these actuators are based on rubber foam. The foam was easily formed into many shapes by molding or hand-shaping.


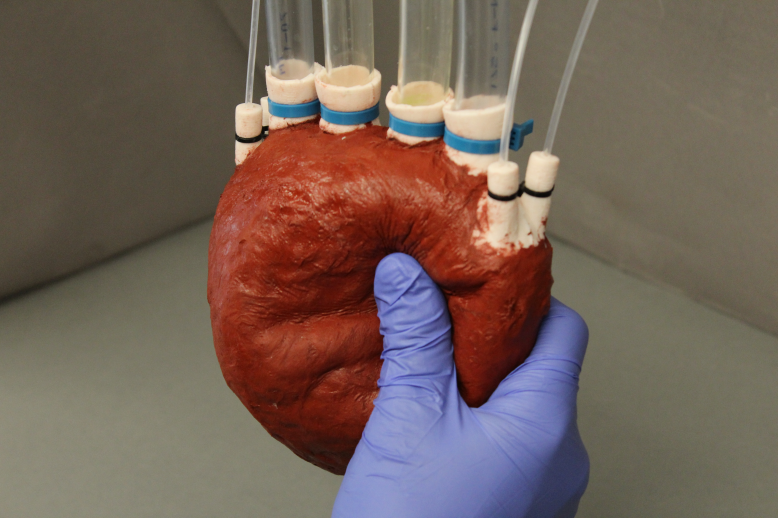
I also made a water pump to demonstrate the utility of this type of actuation. The pump was designed to look and function similar to a human heart, though the pump contains only 2 chambers rather than the heart's 4.

The 4 thin tubes supply and remove pressurized air from the foam surrounding inner fluid chambers. These are the artificial "muscles" that perform the pumping. The 4 larger tubes transport the water being pumped. One is an outlet and one an inlet for each of the 2 internal chambers.

The heart pump is made up of A) a solid silicone manifold, B) inflatable silicone foam "muscle", C) a solid silicone divider, D) tubing to pump air in and out, E) tubing to pump water in and out, and F) 2 water-filled chambers. Red Xs represent closed valves

The pump operates by sending compressed air through A1 into the left side foam. This pressurizes water on the left side and pumps it via W1 into the right chamber. A1 is then vented while A2 is pressurized. Now the right water chamber is pressurized, pumping water via W2 into the left chamber. By alternately opening/closing valves in W1 and W2, we achieved water flow in a single direction.
We operated the pump while performing an x-ray to see the chambers inflating and deflating as water was pumped in and out. We also measured the air pressure, water flow rate, and water pressure at several frequencies relevant to normal heart rates.
For much more info, visit: https://softroboticstoolkit.com/foam-based-soft-actuators
Original publication: https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.201503464